Elektro
Dosen & Schalter
Steckdosen, Schalter und Verteiler – Dosenpositionen direkt aus dem Modell.
Der Markierungsroboter
Der PRALEX-Roboter fährt autonom über die Baustelle, lokalisiert sich anhand des Modells und projiziert die geplanten Markierungspunkte mit einem grünen Laser – als Demonstrator für das PRALEX-Ökosystem.
Designstudie · Konzept-Demonstrator
Warum
Auf der Baustelle wird ständig gemessen, angerissen und ausgesteckt: Steckdosen, Bohrlöcher, Trennwände, Trassen. Vieles davon von Hand, Punkt für Punkt – langsam und fehleranfällig.
Dabei stehen die Positionen längst im BIM-Modell. Der Roboter überträgt sie direkt auf die Baustelle – schnell, wiederholbar und ohne den Plan vor Ort neu zu interpretieren.
Anwendung
Statt Pläne von Hand auf die Baustelle zu übertragen, setzt der Roboter die Punkte dorthin, wo sie im BIM-Modell geplant sind.
Steckdosen, Schalter, Durchbrüche, Befestigungspunkte – als grünes Laserkreuz an die Wand projiziert, an der geplanten Position. Der Bauarbeiter markiert oder bohrt direkt am Punkt.

Trassen und Befestigungspunkte für Lüftung, Rohrleitungen und abgehängte Decken – an die Rohdecke projiziert. Die Haustechnik wird sichtbar, bevor sie montiert wird.

Steckdosen und Durchbrüche sind nur der Anfang – markiert wird, was im Modell eine Position hat.
Elektro
Steckdosen, Schalter und Verteiler – Dosenpositionen direkt aus dem Modell.
Montage
Befestigungspunkte für Halter, Schienen und Konsolen aller Art.
Rohbau
Aussparungen und Durchbrüche für Leitungen, Rohre und Kanäle.
Trockenbau
Achsen für Ständerwerk und Trennwände – auch auf Gipskarton.
Haustechnik
Verlauf und Abhängepunkte für Lüftung, Sanitär und Elektro.
Referenz
Meterrisse, Referenzlinien und Achsen im Raum.
Auf Beton, Mauerwerk, Gipskarton und Estrich – an Wand, Boden und Decke.
Modell → Realität
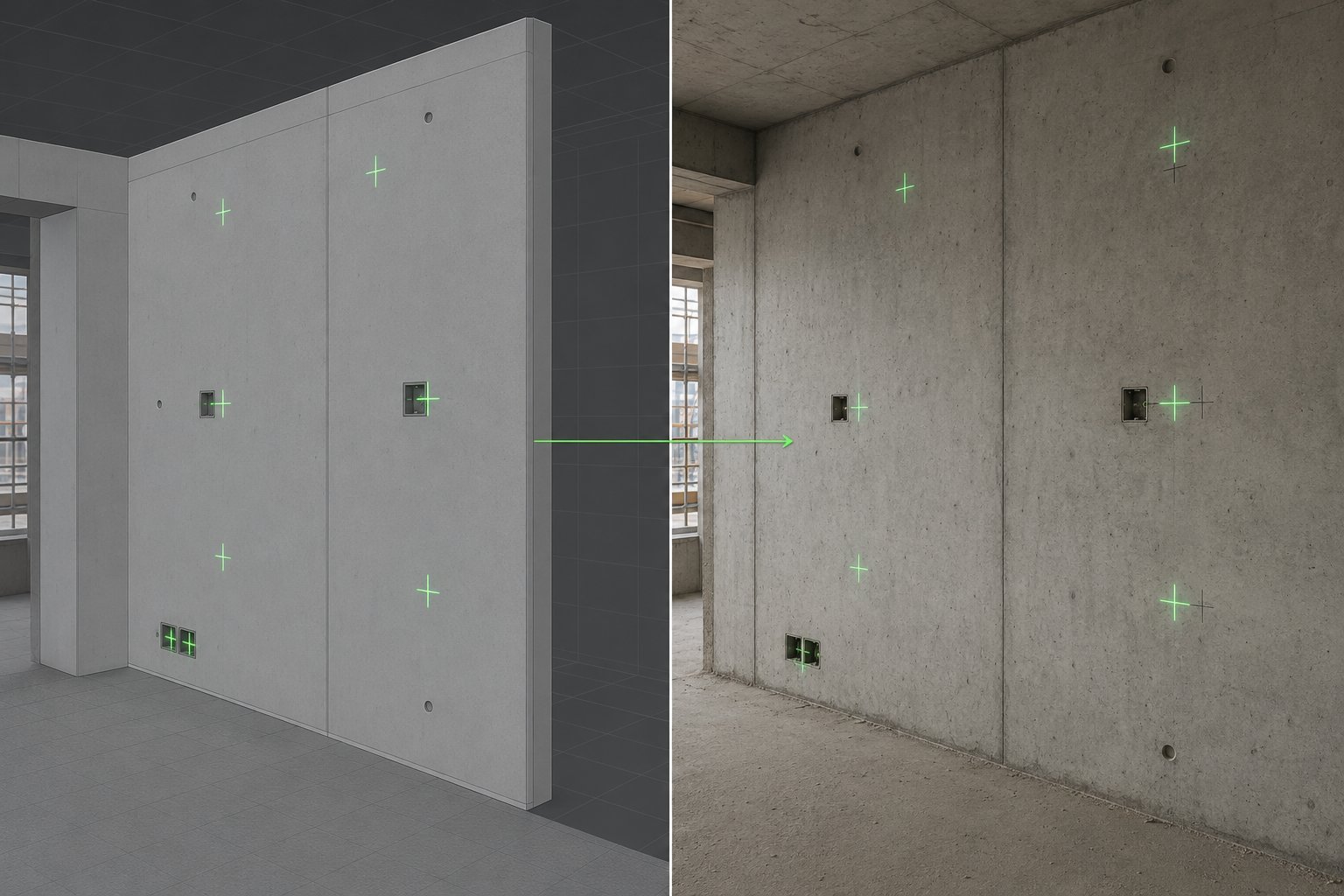
Dieselben Punkte – einmal im Modell, einmal an der Wand. Was geplant ist, wird auf die Baustelle übertragen.
Links die Punkte im BIM-Modell, rechts dieselben Punkte als grüne Laserkreuze an der Betonwand.
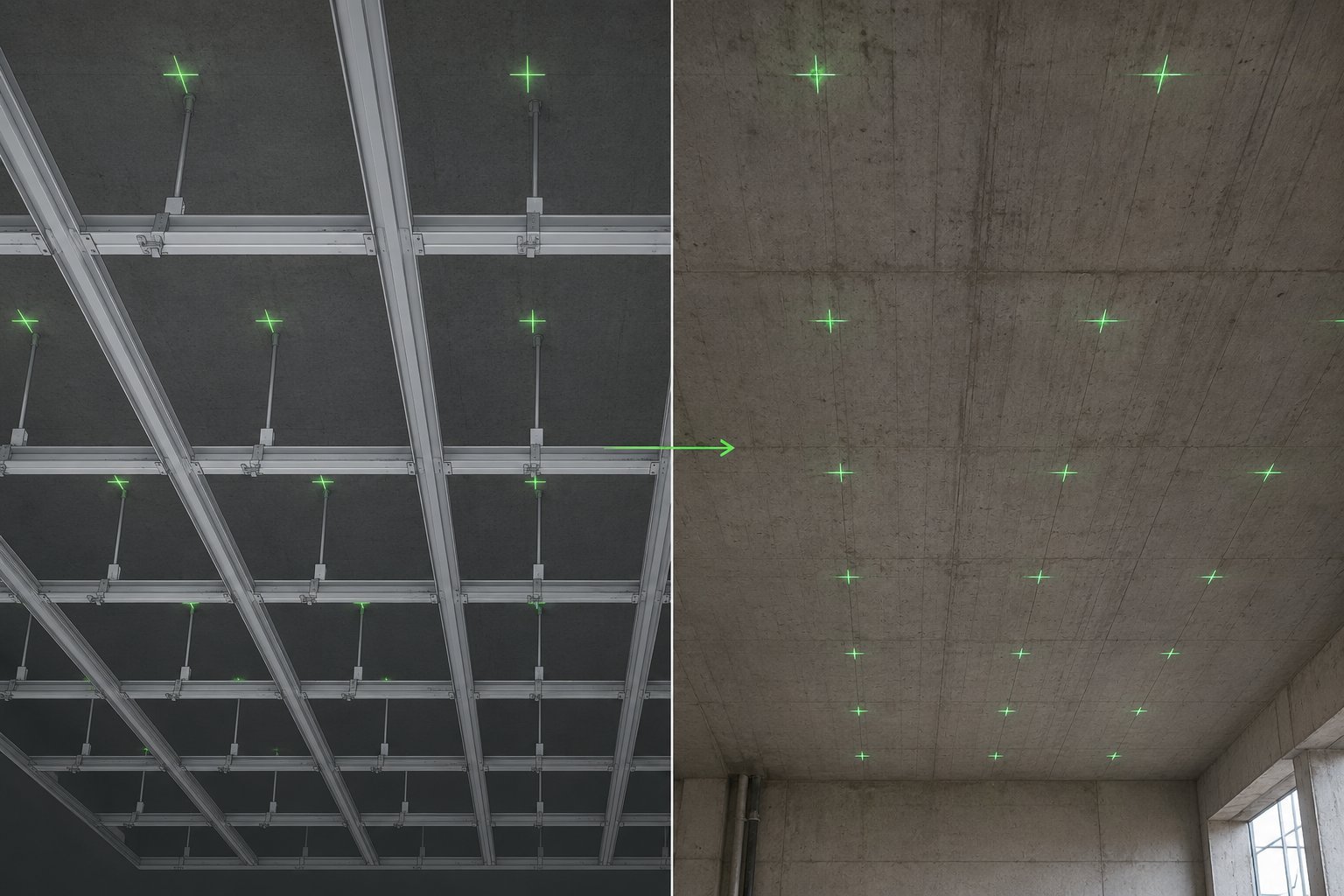
Das Aufhängeraster der abgehängten Decke aus dem Modell – als Punktraster an die Rohdecke übertragen.
Ablauf
Vier Bausteine bringen die Planung auf die Baustelle – vom BIM-Modell bis zum Laserkreuz an der Wand.
1 · BIM
Raumgeometrie und geplante Punkte kommen aus Revit (über PRALEX for Revit) oder aus jedem Werkzeug, das IFC exportiert – als offenes Robotic Construction Format (.rcf).
2 · Planung
Berechnet Standpunkte und Fahrweg: wo der Roboter stehen muss, um alle Punkte zu erreichen.
3 · Koordination
Speichert die Aufträge und verteilt sie – auf der Baustelle oder in der Cloud.
4 · Vor Ort
Eine Web-App (PWA) steuert den Roboter auf der Baustelle: Auftrag laden, abfahren, markieren.
PRALEX Planner
Der PRALEX Planner ist unsere eigene Software. Aus den Punkten im BIM-Modell berechnet sie den kompletten Roboter-Auftrag: wo der Roboter stehen muss – und in welcher Reihenfolge er die Standpunkte abfährt.
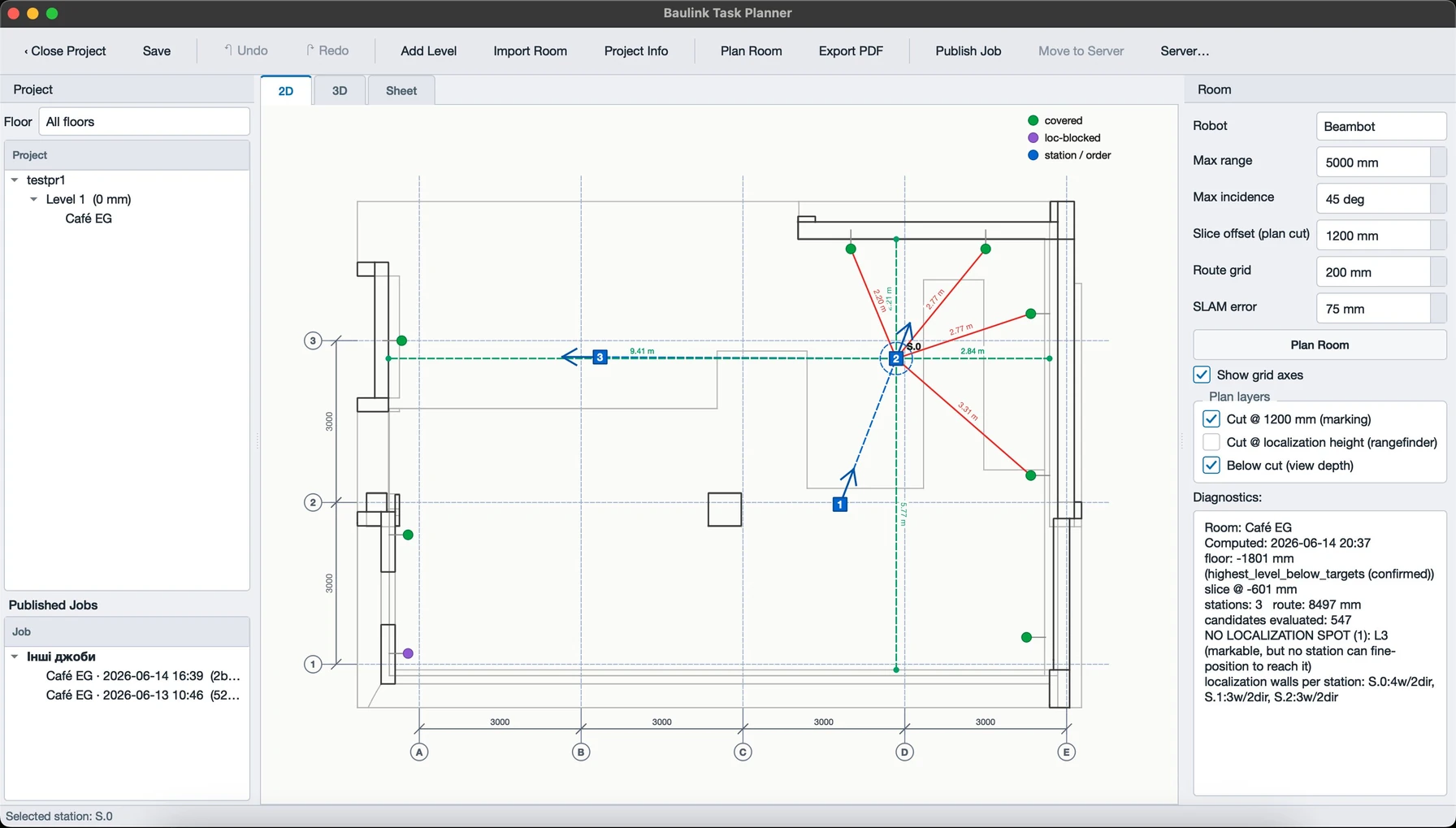
Standpunkte
Von jedem Standpunkt erreicht der Laser nur einen Teil der Punkte – begrenzt durch Reichweite, Winkel, Sichtlinie und freien Stellplatz. Der Planer wählt die wenigsten Standpunkte, die zusammen alle Punkte abdecken.
Route
Die Standpunkte werden zur kürzesten Fahrt geordnet – gerechnet als echte Fahrstrecke um Wände herum, nicht als Luftlinie. So fährt der Roboter so wenig wie möglich.
Diagnose
Punkte, die kein Standpunkt sicher erreicht, werden gekennzeichnet – statt stillschweigend weggelassen. So ist vorher klar, was der Roboter schafft.
Alles sichtbar im 2D-Grundriss und im 3D-Modell – stockwerkweise. Desktop-App für Windows und macOS.
Plattform
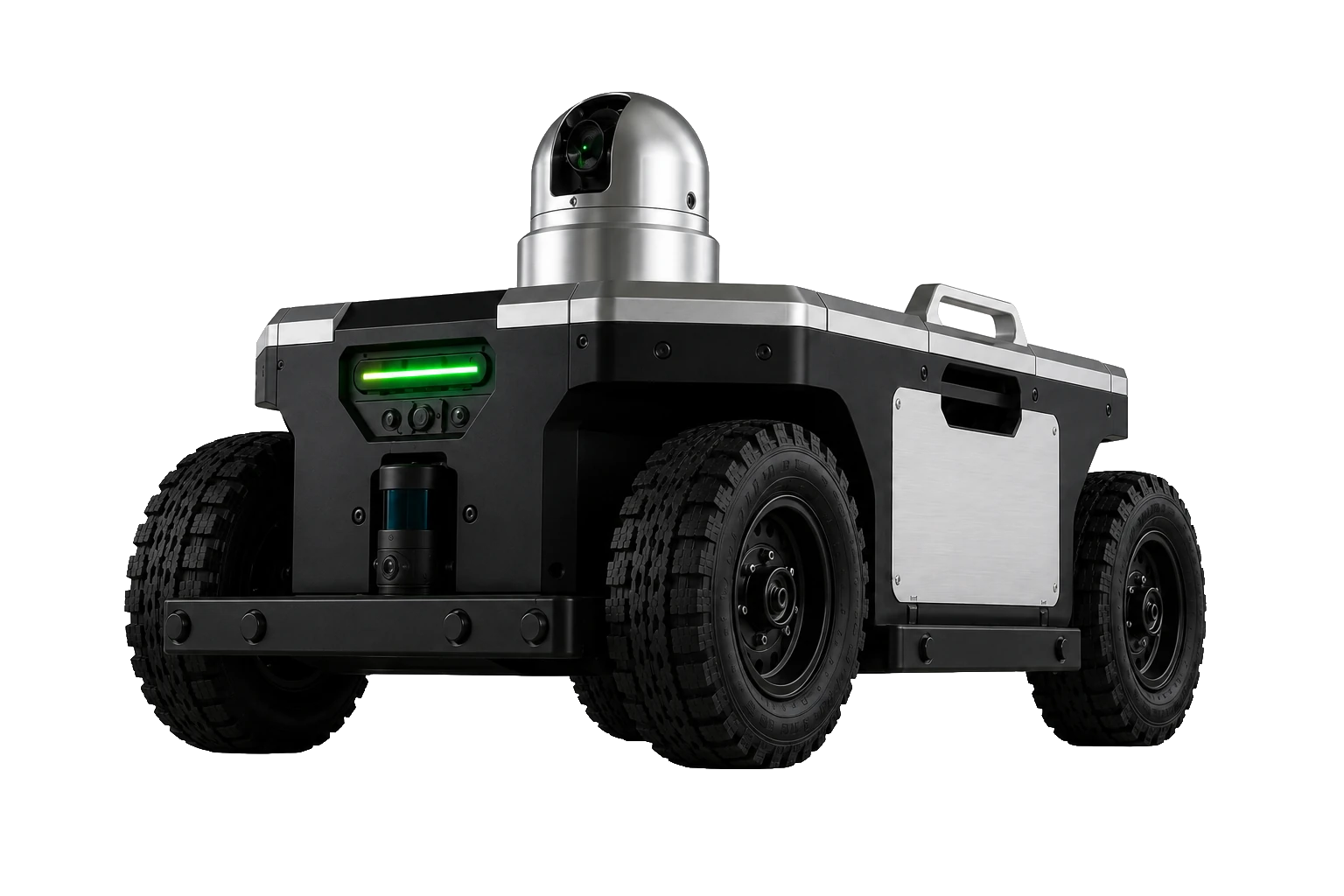
Der Markierungsroboter baut auf der modularen PRALEX-Plattform auf – mit einem gemeinsamen Navigationsmodul aus 3D-LIDAR, Laser-Distanzmesser und KI-Kamera. Dieselbe Basis trägt auch andere Rollen.
Aufbau
Eine kompakte mobile Plattform mit den Bausteinen, die Markierung auf der Baustelle möglich machen.
Fahrwerk
Vierrädriges Fahrwerk für die Baustelle – ausgelegt auf Staub, Schutt und unebenen Untergrund.
Markierung
Schwenk-/Neigekopf mit grünem 520-nm-Laser, der die Punkte an Wand und Decke anzeigt.
Lokalisierung
Erfasst den Raum und hilft, die Position des Roboters mit dem Modell abzugleichen.
Wahrnehmung
Unterstützt Ausrichtung und Kontrolle – und macht den abgesetzten Punkt nachvollziehbar.
Bedienung
Modell laden, Punkte auswählen, abfahren – die Baustelle bedient den Roboter über ein Tablet.
Sicherheit
Not-Halt und Status-Anzeige am Gerät; Laserschutz ist Teil der Auslegung.
Konzept-Demonstrator in Entwicklung · Genauigkeit ist ein Entwicklungsziel, keine zugesicherte Spezifikation.
Teil des Ganzen
Der Roboter zeigt, was möglich ist. Das Ziel dahinter ist eine offene Plattform für Bauroboter und Baumaschinen – mit gemeinsamem Datenformat, Koordinations-Server und modularer Roboter-Basis.